Next: 21.1 Time Integration Up: V. Physics Units Previous: 20.5 Unit Tests Contents Index
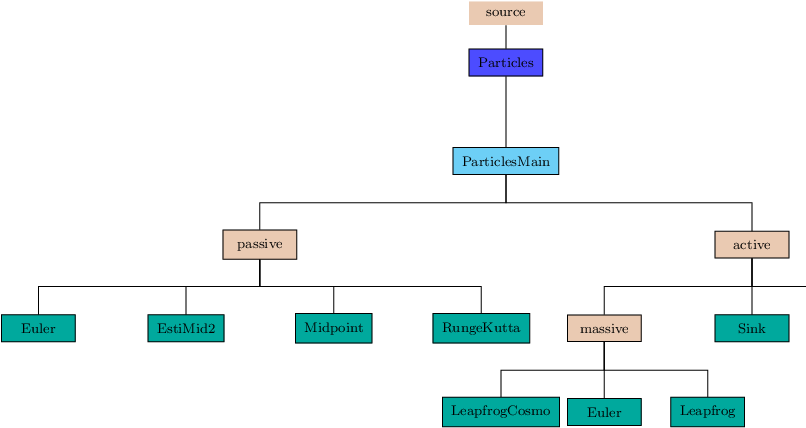
The support for particles in FLASH4 comes in two
flavors, active and passive. Active particles are
further classified into two categories; massive and
charged. The active particles contribute to the dynamics of the
simulation, while passive particles follow the motion of Lagrangian
tracers and make no contribution to the dynamics. Particles are
dimensionless objects characterized by positions ![]() ,
velocities
,
velocities ![]() , and sometimes other quantities such as mass
, and sometimes other quantities such as mass
![]() or charge
or charge ![]() . Their characteristic quantities are considered
to be defined at their positions and may be set by interpolation from
the mesh or may be used to define mesh quantities by
extrapolation. They move relative to the mesh and can travel from
block to block, requiring communication patterns different from those
used to transfer boundary information between processors for mesh-based
data.
. Their characteristic quantities are considered
to be defined at their positions and may be set by interpolation from
the mesh or may be used to define mesh quantities by
extrapolation. They move relative to the mesh and can travel from
block to block, requiring communication patterns different from those
used to transfer boundary information between processors for mesh-based
data.
Passive particles acquire their kinematic information (velocities)
directly from the mesh. They are meant to be used as passive flow tracers and
do not make sense outside of a hydrodynamical context. The governing
equation for the ![]() th passive particle is particularly simple and
requires only the time integration of interpolated mesh
velocities.
th passive particle is particularly simple and
requires only the time integration of interpolated mesh
velocities.
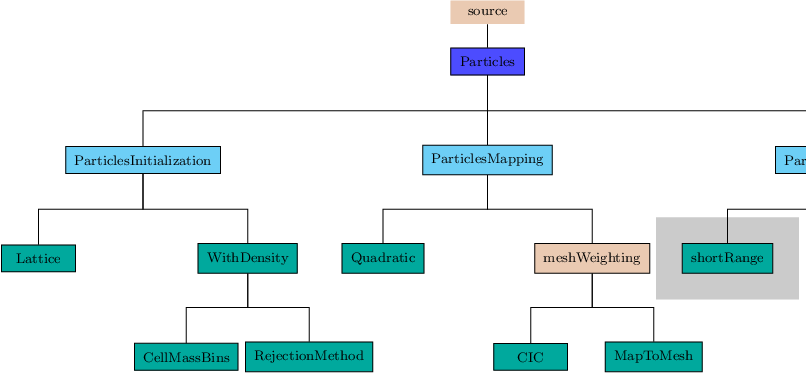
For both types of particles, the primary challenge is to integrate (21.1) forward through time. Many alternative integration methods are described in Section Sec:Particles Integration below. Additional information about the mesh to particle mapping is described in Sec:Particles Mapping. An introduction to the particle techniques used in FLASH is given by R. W. Hockney and J. W. Eastwood in Computer Simulation using Particles (Taylor and Francis, 1988).
FLASH4 includes support for sink particles. These are a special kind of (massive) active particles, with special rules for creation, mass accretion, and interaction with fluid variables and other particles. See Sec:Particles Sink below for information specific to sink particles.