Next: 18.4 Energy Deposition Unit Up: 18. Local Source Terms Previous: 18.2 Ionization Unit Contents Index
The addition of driving terms in a hydrodynamical simulation can be a useful feature, for example, in generating turbulent flows or for simulating the addition of power on larger scales (e.g., supernova feedback into the interstellar medium). The Stir unit comes in two implementations: 1) the Generate implementation, in which a divergence-free, random time-correlated `stirring' velocity is directly added at selected modes in the simulation and 2) the FromFile implementation, in which a stirring field is set up from data residing on a file. The FromFile implementation allows to set up identical stirring fields on different platforms, and thus comparisons can be made between different codes.
Before FLASH 4.2, the implementation now called Generate was
the only one provided. It is still the default that is being
used if one specifies just
![]()
in a Config file or -unit=physics/sourceTerms/Stir on the
setup command line.
In the generate implementation, the Stir unit directly adds a divergence-free, time-correlated `stirring' velocity at selected modes in the simulation.
The time-correlation is important for modeling realistic driving forces. Most large-scale driving forces are time-correlated, rather than white-noise; for instance, turbulent stirring from larger scales will be correlated on timescales related to the lifetime of an eddy on the scale of the simulation domain. This time correlation will lead to coherent structures in the simulation that will be absent with white-noise driving.
For each mode at each timestep, six separate phases (real and
imaginary in each of the three spatial dimensions) are evolved by an
Ornstein-Uhlenbeck (OU) random process (Uhlenbeck 1930). The OU process is a zero-mean,
constant-rms
process, which at each step `decays' the previous value by an exponential
![]() and then adds a Gaussian random variable with
a given variance, weighted by a 'driving' factor
and then adds a Gaussian random variable with
a given variance, weighted by a 'driving' factor
![]() .
Since the OU process represents a
velocity, the variance is chosen to be the square root of the specific
energy input rate (set by the runtime parameter st_energy)
divided by the decay time
.
Since the OU process represents a
velocity, the variance is chosen to be the square root of the specific
energy input rate (set by the runtime parameter st_energy)
divided by the decay time ![]() (st_decay). In the limit that the
timestep
(st_decay). In the limit that the
timestep
![]() , it is easily seen that the algorithm
represents a linearly-weighted summation of the old state with the new
Gaussian random variable.
, it is easily seen that the algorithm
represents a linearly-weighted summation of the old state with the new
Gaussian random variable.
By evolving the phases of the stirring modes in Fourier space, imposing a divergence-free condition is relatively straightforward. At each timestep, the solenoidal component of the velocities is projected out, leaving only the non-compressional modes to add to the velocities.
The velocities are then converted to physical space by a direct Fourier
transform - i.e., adding the ![]() and
and ![]() terms explicitly.
Since most drivings involve a fairly small number of modes,
this is more efficient than an FFT, since the FFT would need large
numbers of modes (equal to six times the number of cells in the domain),
the vast majority of which would have zero amplitude.
terms explicitly.
Since most drivings involve a fairly small number of modes,
this is more efficient than an FFT, since the FFT would need large
numbers of modes (equal to six times the number of cells in the domain),
the vast majority of which would have zero amplitude.
In the from file implementation, the Stir unit sets up a stirring field from data residing on a file. Here we summarize the method for driving turbulence used in Federrath et al. (2010, A&A, 512, A81). Please refer to that paper for further details.
Turbulence decays in about a crossing time, because the kinetic energy carried by the turbulence
dissipates on small scales and turns into heat. In order to study the statistics of turbulence
(e.g., the PDF, power spectrum, structure functions, etc.) over a significant time period thus
requires continuous stirring (also called driving or forcing) with a turbulent acceleration field,
which we call
![]() in the following.
in the following.
The stirring field ![]() is often modeled with a spatially static pattern for which the amplitude
is adjusted in time. This results in a roughly constant energy input on large scales, but has the
disadvantage that the turbulence is not really random, because the large-scale pattern is fixed, which
may introduce undesirable systematics. Other studies model
is often modeled with a spatially static pattern for which the amplitude
is adjusted in time. This results in a roughly constant energy input on large scales, but has the
disadvantage that the turbulence is not really random, because the large-scale pattern is fixed, which
may introduce undesirable systematics. Other studies model ![]() such that it can vary in time
and space to achieve a smoothly varying pattern that resembles the flow of kinetic energy from
scales larger than the simulation box scale. The most widely used method to achieve this is the
Ornstein-Uhlenbeck (OU) process. The OU process is a well-defined stochastic process with a finite
autocorrelation timescale. It can be used to excite turbulent motions in 3D, 2D, or 1D simulations
as explained in Eswaran & Pope (1988, Computers & Fluids, 16, 257).
such that it can vary in time
and space to achieve a smoothly varying pattern that resembles the flow of kinetic energy from
scales larger than the simulation box scale. The most widely used method to achieve this is the
Ornstein-Uhlenbeck (OU) process. The OU process is a well-defined stochastic process with a finite
autocorrelation timescale. It can be used to excite turbulent motions in 3D, 2D, or 1D simulations
as explained in Eswaran & Pope (1988, Computers & Fluids, 16, 257).
The OU process is a stochastic differential equation describing the evolution of
![]() in Fourier space (
in Fourier space (![]() -space):
-space):
| (18.28) |
 |
The second term on the right-hand side of equation (18.27) is a drift term describing the
exponential decay of the autocorrelation of ![]() . The usual procedure is to set the autocorrelation
timescale equal to the turbulent crossing time,
. The usual procedure is to set the autocorrelation
timescale equal to the turbulent crossing time,
![]() , on the scale of energy injection,
, on the scale of energy injection,
![]() . This type of stirring models the kinetic energy input from large-scale turbulent
fluctuations breaking up into smaller and smaller structures.
. This type of stirring models the kinetic energy input from large-scale turbulent
fluctuations breaking up into smaller and smaller structures.
The runtime parameters associated with the StirFromFile unit are described in the 18.3.3 section.
| Variable | Type | Default | Description |
| useStir | boolean | .true. | switch stirring on/off |
| st_computeDt | boolean | .false. | restrict timestep based on stirring |
| st_infilename | string | "forcingfile.dat" | file containing the stirring time sequence |
Table 18.2 lists the runtime parameters for the StirFromFile unit. This includes a switch for turning the stirring module on/off and a switch to restrict the timestep based on the acceleration field used for stirring (st_computeDt is switched off by default, because it is normally sufficient to restrict the timestep based on the gas velocity). Finally, st_infilename is the name of the input file containing the time and mode sequence used for stirring. This file must be prepared in advance with a separate Fortran program located in SimulationMain/StirFromFile/forcing_generator/. The reason for this structural splitting is to predetermine what the code is going to do. For instance, by preparing the time sequence of the stirring in advance, one can always reproduce exactly the full evolution of all driving patterns applied during a simulation. It also has the advantage that exactly identical stirring patterns can be applied in completely different codes, because they read the time and mode sequence from the same stirring file (Price & Federrath, 2010, MNRAS, 406, 1659).
The stirring module is compatible with any hydro or MHD solver and any grid implementation (uniform
or AMR). Upon inclusion in a FLASH setup or module, the StirFromFile module defines three
additional grid scalar fields, accx, accy, and accz, holding the three vector
components of the stirring field ![]() .
.
| Variable | Type | Default | Description |
| ndim | integer | The dimensionality of the simulation (1, 2, or 3) | |
| xmin, xmax | real |
|
Domain boundary coordinates in |
| ymin, ymax | real |
|
Domain boundary coordinates in |
| zmin, zmax | real |
|
Domain boundary coordinates in |
| st_spectform | integer | Spectral shape (0: band, 1: paraboloid) | |
| st_decay | real | Autocorrelation time of the OU process,
|
|
| st_energy | real | 2e-3 | Determines the driving amplitude |
| st_stirmin | real | Minimum wavenumber stirred (e.g.,
|
|
| st_stirmax | real | Maximum wavenumber stirred (e.g.,
|
|
| st_solweight | real | Mode mixture
|
|
| st_seed | integer | Random seed for stirring sequence | |
| end_time | real | Final time in stirring sequence | |
| nsteps | integer | Number of realizations between |
|
| outfilename | string | "forcingfile.dat" | Output name (input file st_infilename for FLASH) |
The code requires a time sequence of stirring modes at runtime, which have to be prepared with the stand-alone Fortran program forcing_generator.F90 in SimulationMain/StirFromFile/forcing_generator/. A Makefile is provided in the same directory. This program prepares the time sequence of Fourier modes, which is then read by FLASH during runtime, to construct the physical acceleration fields used for stirring. It controls the spatial structure and the temporal correlation of the driving, its amplitude, the mode mixture, and the time separation between successive driving patterns. The user has to modify forcing_generator.F90 to construct a requested driving sequence and to tailor it to the desired physical situation to be modeled.
Table 18.3 lists all the parameters that can be adjusted in the main routine
of forcing_generator.F90. Most of them are straightforward to set (ndim,
xmin, xmax, ymin, ...18.1), but others
may require some explanation. For example, st_spectform determines the shape of the driving amplitude
in Fourier space. Many colleagues drive a band (st_spectform=0), i.e., equal power injected between
wavenumber modes
![]() and
and
![]() . This produces a
sharp transition between stirred modes and modes that are not stirred. Here we set the default to a smooth
function, a paraboloid (st_spectform=1), such that most power is injected on wavenumber
. This produces a
sharp transition between stirred modes and modes that are not stirred. Here we set the default to a smooth
function, a paraboloid (st_spectform=1), such that most power is injected on wavenumber
![]() and falls off quadratically towards both wavenumber ends,
normalized such that the injected power at
and falls off quadratically towards both wavenumber ends,
normalized such that the injected power at
![]() and
and
![]() vanishes. This has the
advantage of defining a characteristic peak injection scale
vanishes. This has the
advantage of defining a characteristic peak injection scale
![]() and achieves a smooth transition
between stirred and non-stirred wavenumbers.
and achieves a smooth transition
between stirred and non-stirred wavenumbers.
st_decay and st_energy determine the autocorrelation time of the OU process and the total injected
energy, which is simply a measure for the normalization of the acceleration field. These parameters must be
adjusted according to the physical setup. For instance, for a given target velocity dispersion ![]() on the injection
scale
on the injection
scale
![]() , the autocorrelation time should be set equal to the turbulent crossing
time,
, the autocorrelation time should be set equal to the turbulent crossing
time,
![]() . In contrast, setting st_decay to a very small or a very large number results
in white noise driving or in a static driving pattern, respectively.
. In contrast, setting st_decay to a very small or a very large number results
in white noise driving or in a static driving pattern, respectively.
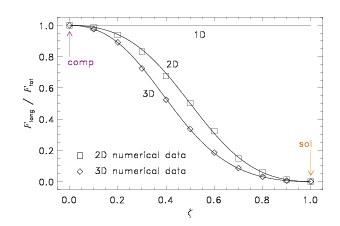
The parameter st_solweight determines whether the acceleration field will be solenoidal (divergence-free)
or compressive (curl-free) or any mixture, according to Equation (18.32). Incompressible gases
should naturally be driven with a purely solenoidal field (![]() ), while compressible turbulence in the
interstellar medium may be driven primarily by a mixture of solenoidal and compressive modes. A detailed study
of the influence of
), while compressible turbulence in the
interstellar medium may be driven primarily by a mixture of solenoidal and compressive modes. A detailed study
of the influence of ![]() is presented in Federrath et al. (2010, A&A, 512, A81).
is presented in Federrath et al. (2010, A&A, 512, A81).
st_seed is the random seed for the OU sequence and determines the pseudo random number sequence for the integrated Box-Muller random number generator.
Finally, end_time and nsteps determine the final physical time for stirring and the number of
driving patterns to be prepared within the time period from ![]() to
to
![]() . This sets the number
of equally-spaced times at which FLASH is going to read a new stirring pattern from the file. This allows the
user to control how frequently a new driving pattern is constructed. A useful time separation of successive
driving patterns is about 10% of a crossing time (or autocorrelation time), i.e., setting
. This sets the number
of equally-spaced times at which FLASH is going to read a new stirring pattern from the file. This allows the
user to control how frequently a new driving pattern is constructed. A useful time separation of successive
driving patterns is about 10% of a crossing time (or autocorrelation time), i.e., setting
![]() . This will sample the smooth changes in the OU
driving sequence sufficiently well for most applications.
. This will sample the smooth changes in the OU
driving sequence sufficiently well for most applications.
An example setup using the StirFromFile unit is located in SimulationMain/StirFromFile/. The unit test can be invoked by
./setup StirFromFile -auto -3d -nxb=16 -nyb=16 -nzb=16 +ug -with-unit=physics/Hydro.
The FLASH executable must be copied into the run directory together with the standard flash.par for this setup, and together with the default forcing file (to be constructed using the standard parameters; see section 18.3.3.2). During runtime the code writes a file with the time evolution of spatially integrated quantities, amongst others, the rms Mach number and vorticity, which can used as basic code checks.