Next: 18.1 Burn Unit Up: V. Physics Units Previous: 17.7 Unit Test Contents Index
|
|
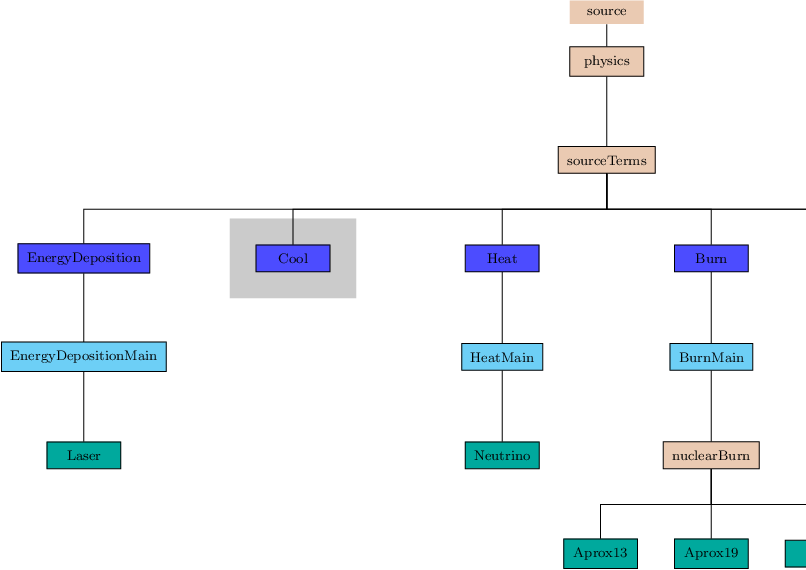
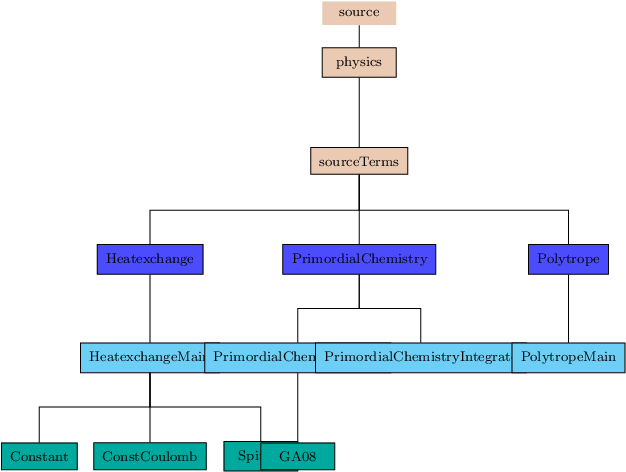
The physics/sourceTerms organizational directory contains several units that implement forcing terms. The Burn, Stir, Ionize, and Diffuse units contain implementations in FLASH4. Two other units, Cool and Heat, contain only stub level routines in their API.